Robotic Goalie
A real-time robotic goalie system that utilizes an iRobot Create 3 to autonomously defend a goal against incoming shots. Built on a Sense → Think → Act pipeline, the system streams live video from a robot-mounted smartphone to a laptop. The software processes the video feed to detect the incoming ball, uses a greedy centering algorithm to determine the necessary trajectory, and instantly issues precise movement commands to the robot via Bluetooth to block the shot.
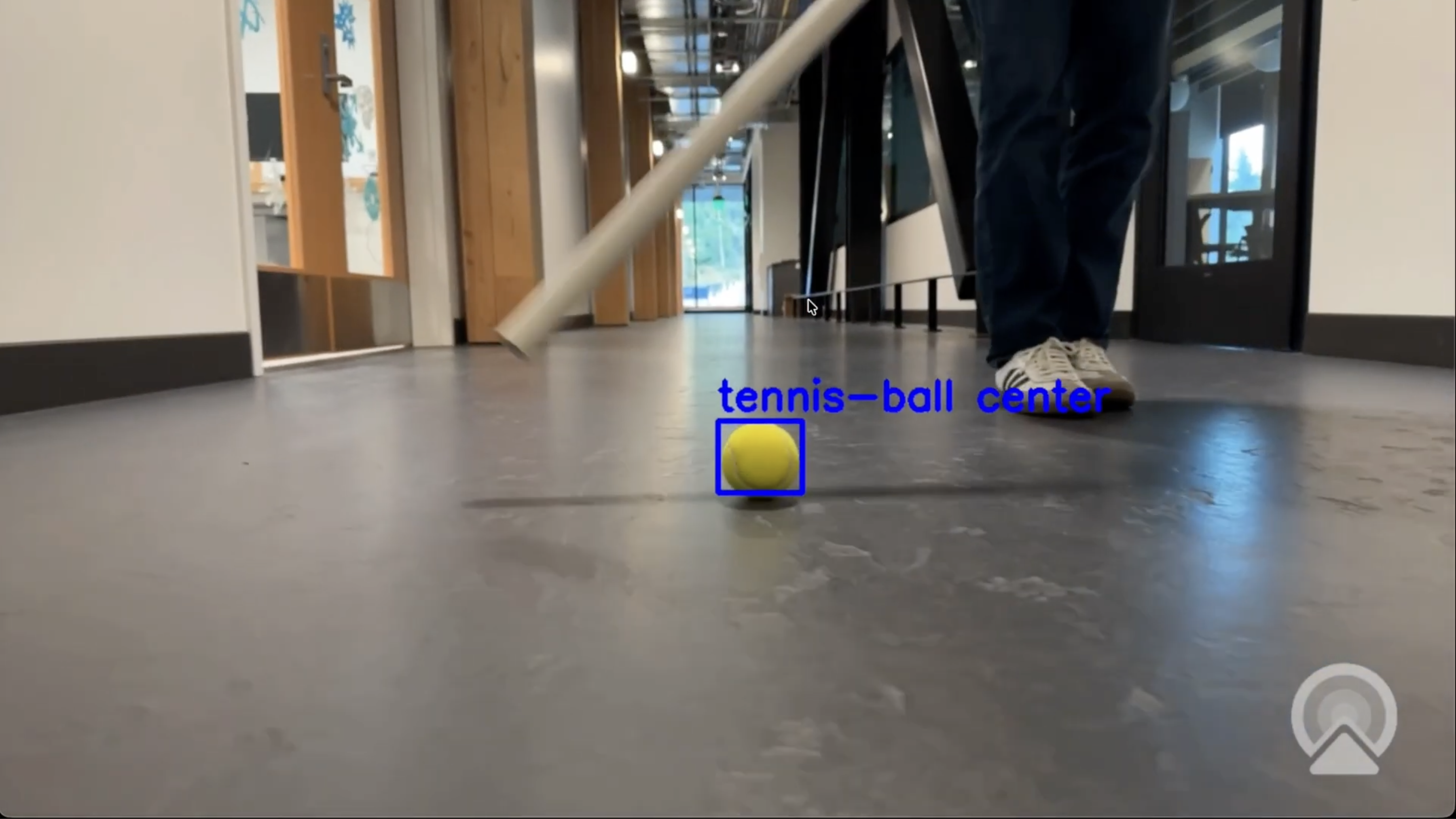
YOLOv8 object detection in action — the model identifies and tracks the incoming ball in real time, drawing a bounding box around the target.

Overhead view of the robotic goalie setup — the iRobot Create 3 positioned in front of the goal, with the smartphone camera mounted to stream live video to the detection pipeline.